Oct. 21, 2024
</p>")
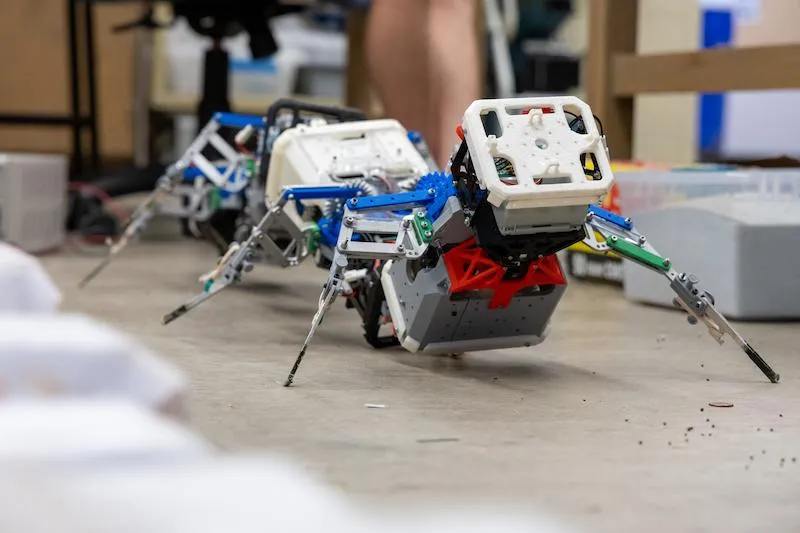
A pair of Smarticle robots from the lab of Prof. Dan Goldman. Earlier research from his group observed the arise of order in active matter from the physics of low rattling. (Photo Credit: Christa M. Ernst)
If you’ve ever watched a large flock of birds on the wing, moving across the sky like a cloud with various shapes and directional changes appearing from seeming chaos, or the maneuvers of an ant colony forming bridges and rafts to escape floods, you’ve been observing what scientists call self-organization. What may not be as obvious is that self-organization occurs throughout the natural world, including bacterial colonies, protein complexes, and hybrid materials. Understanding and predicting self-organization, especially in systems that are out of equilibrium, like living things, is an enduring goal of statistical physics.
This goal is the motivation behind a recently introduced principle of physics called rattling, which posits that systems with sufficiently “messy” dynamics organize into what researchers refer to as low rattling states. Although the principle has proved accurate for systems of robot swarms, it has been too vague to be more broadly tested, and it has been unclear exactly why it works and to what other systems it should apply.
Dana Randall, a professor in the School of Computer Science, and Jacob Calvert, a postdoctoral fellow at the Institute for Data Engineering and Science, have formulated a theory of rattling that answers these fundamental questions. Their paper, “A Local-Global Principle for Nonequilibrium Steady States,” published last week in Proceedings of the National Academy of Sciences, characterizes how rattling is related to the amount of time that a system spends in a state. Their theory further identifies the classes of systems for which rattling explains self-organization.
When we first heard about rattling from physicists, it was very hard to believe it could be true. Our work grew out of a desire to understand it ourselves. We found that the idea at its core is surprisingly simple and holds even more broadly than the physicists guessed.
Dana Randall Professor, School of Computer Science & Adjunct Professor, School of Mathematics
Georgia Institute of Technology
Beyond its basic scientific importance, the work can be put to immediate use to analyze models of phenomena across scientific domains. Additionally, experimentalists seeking organization within a nonequilibrium system may be able to induce low rattling states to achieve their desired goal. The duo thinks the work will be valuable in designing microparticles, robotic swarms, and new materials. It may also provide new ways to analyze and predict collective behaviors in biological systems at the micro and nanoscale.
The preceding material is based on work supported by the Army Research Office under award ARO MURI Award W911NF-19-1-0233 and by the National Science Foundation under grant CCF-2106687. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the sponsoring agencies.
Jacob Calvert and Dana Randall. A local-global principle for nonequilibrium steady states. Proceedings of the National Academy of Sciences, 121(42):e2411731121, 2024.
Oct. 01, 2024

The Institute for Robotics and Intelligent Machines (IRIM) launched a new initiatives program, starting with several winning proposals, with corresponding initiative leads that will broaden the scope of IRIM’s research beyond its traditional core strengths. A major goal is to stimulate collaboration across areas not typically considered as technical robotics, such as policy, education, and the humanities, as well as open new inter-university and inter-agency collaboration routes. In addition to guiding their specific initiatives, these leads will serve as an informal internal advisory body for IRIM. Initiative leads will be announced annually, with existing initiative leaders considered for renewal based on their progress in achieving community building and research goals. We hope that initiative leads will act as the “faculty face” of IRIM and communicate IRIM’s vision and activities to audiences both within and outside of Georgia Tech.
Meet 2024 IRIM Initiative Leads
Stephen Balakirsky; Regents' Researcher, Georgia Tech Research Institute & Panagiotis Tsiotras; David & Andrew Lewis Endowed Chair, Daniel Guggenheim School of Aerospace Engineering | Proximity Operations for Autonomous Servicing
Why It Matters: Proximity operations in space refer to the intricate and precise maneuvers and activities that spacecraft or satellites perform when they are in close proximity to each other, such as docking, rendezvous, or station-keeping. These operations are essential for a variety of space missions, including crewed spaceflights, satellite servicing, space exploration, and maintaining satellite constellations. While this is a very broad field, this initiative will concentrate on robotic servicing and associated challenges. In this context, robotic servicing is composed of proximity operations that are used for servicing and repairing satellites in space. In robotic servicing, robotic arms and tools perform maintenance tasks such as refueling, replacing components, or providing operation enhancements to extend a satellite's operational life or increase a satellite’s capabilities.
Our Approach: By forming an initiative in this important area, IRIM will open opportunities within the rapidly evolving space community. This will allow us to create proposals for organizations ranging from NASA and the Defense Advanced Research Projects Agency to the U.S. Air Force and U.S. Space Force. This will also position us to become national leaders in this area. While several universities have a robust robotics program and quite a few have a strong space engineering program, there are only a handful of academic units with the breadth of expertise to tackle this problem. Also, even fewer universities have the benefit of an experienced applied research partner, such as the Georgia Tech Research Institute (GTRI), to undertake large-scale demonstrations. Georgia Tech, having world-renowned programs in aerospace engineering and robotics, is uniquely positioned to be a leader in this field. In addition, creating a workshop in proximity operations for autonomous servicing will allow the GTRI and Georgia Tech space robotics communities to come together and better understand strengths and opportunities for improvement in our abilities.
Matthew Gombolay; Assistant Professor, Interactive Computing | Human-Robot Society in 2125: IRIM Leading the Way
Why It Matters: The coming robot “apocalypse” and foundation models captured the zeitgeist in 2023 with “ChatGPT” becoming a topic at the dinner table and the probability occurrence of various scenarios of AI driven technological doom being a hotly debated topic on social media. Futuristic visions of ubiquitous embodied Artificial Intelligence (AI) and robotics have become tangible. The proliferation and effectiveness of first-person view drones in the Russo-Ukrainian War, autonomous taxi services along with their failures, and inexpensive robots (e.g., Tesla’s Optimus and Unitree’s G1) have made it seem like children alive today may have robots embedded in their everyday lives. Yet, there is a lack of trust in the public leadership bringing us into this future to ensure that robots are developed and deployed with beneficence.
Our Approach: This proposal seeks to assemble a team of bright, savvy operators across academia, government, media, nonprofits, industry, and community stakeholders to develop a roadmap for how we can be the most trusted voice to guide the public in the next 100 years of innovation in robotics here at the IRIM. We propose to carry out specific activities that include conducting the activities necessary to develop a roadmap about Robots in 2125: Altruistic and Integrated Human-Robot Society. We also aim to build partnerships to promulgate these outcomes across Georgia Tech’s campus and internationally.
Gregory Sawicki; Joseph Anderer Faculty Fellow, School of Mechanical Engineering & Aaron Young; Associate Professor, Mechanical Engineering | Wearable Robotic Augmentation for Human Resilience
Why It Matters: The field of robotics continues to evolve beyond rigid, precision-controlled machines for amplifying production on manufacturing assembly lines toward soft, wearable systems that can mediate the interface between human users and their natural and built environments. Recent advances in materials science have made it possible to construct flexible garments with embedded sensors and actuators (e.g., exosuits). In parallel, computers continue to get smaller and more powerful, and state-of-the art machine learning algorithms can extract useful information from more extensive volumes of input data in real time. Now is the time to embed lean, powerful, sensorimotor elements alongside high-speed and efficient data processing systems in a continuous wearable device.
Our Approach: The mission of the Wearable Robotic Augmentation for Human Resilience (WeRoAHR) initiative is to merge modern advances in sensing, actuation, and computing technology to imagine and create adaptive, wearable augmentation technology that can improve human resilience and longevity across the physiological spectrum — from behavioral to cellular scales. The near-term effort (~2-3 years) will draw on Georgia Tech’s existing ecosystem of basic scientists and engineers to develop WeRoAHR systems that will focus on key targets of opportunity to increase human resilience (e.g., improved balance, dexterity, and stamina). These initial efforts will establish seeds for growth intended to help launch larger-scale, center-level efforts (>5 years).
Panagiotis Tsiotras; David & Andrew Lewis Endowed Chair, Daniel Guggenheim School of Aerospace Engineering & Sam Coogan; Demetrius T. Paris Junior Professor, School of Electrical and Computer Engineering | Initiative on Reliable, Safe, and Secure Autonomous Robotics
Why It Matters: The design and operation of reliable systems is primarily an integration issue that involves not only each component (software, hardware) being safe and reliable but also the whole system being reliable (including the human operator). The necessity for reliable autonomous systems (including AI agents) is more pronounced for “safety-critical” applications, where the result of a wrong decision can be catastrophic. This is quite a different landscape from many other autonomous decision systems (e.g., recommender systems) where a wrong or imprecise decision is inconsequential.
Our Approach: This new initiative will investigate the development of protocols, techniques, methodologies, theories, and practices for designing, building, and operating safe and reliable AI and autonomous engineering systems and contribute toward promoting a culture of safety and accountability grounded in rigorous objective metrics and methodologies for AI/autonomous and intelligent machines designers and operators, to allow the widespread adoption of such systems in safety-critical areas with confidence. The proposed new initiative aims to establish Tech as the leader in the design of autonomous, reliable engineering robotic systems and investigate the opportunity for a federally funded or industry-funded research center (National Science Foundation (NSF) Science and Technology Centers/Engineering Research Centers) in this area.
Colin Usher; Robotics Systems and Technology Branch Head, GTRI | Opportunities for Agricultural Robotics and New Collaborations
Why It Matters: The concepts for how robotics might be incorporated more broadly in agriculture vary widely, ranging from large-scale systems to teams of small systems operating in farms, enabling new possibilities. In addition, there are several application areas in agriculture, ranging from planting, weeding, crop scouting, and general growing through harvesting. Georgia Tech is not a land-grant university, making our ability to capture some of the opportunities in agricultural research more challenging. By partnering with a land-grant university such as the University of Georgia (UGA), we can leverage this relationship to go after these opportunities that, historically, were not available.
Our Approach: We plan to build collaborations first by leveraging relationships we have already formed within GTRI, Georgia Tech, and UGA. We will achieve this through a significant level of networking, supported by workshops and/or seminars with which to recruit faculty and form a roadmap for research within the respective universities. Our goal is to identify and pursue multiple opportunities for robotics-related research in both row-crop and animal-based agriculture. We believe that we have a strong opportunity, starting with formalizing a program with the partners we have worked with before, with the potential to improve and grow the research area by incorporating new faculty and staff with a unified vision of ubiquitous robotics systems in agriculture. We plan to achieve this through scheduled visits with interested faculty, attendance at relevant conferences, and ultimately hosting a workshop to formalize and define a research roadmap.
Ye Zhao; Assistant Professor, School of Mechanical Engineering | Safe, Social, & Scalable Human-Robot Teaming: Interaction, Synergy, & Augmentation
Why It Matters: Collaborative robots in unstructured environments such as construction and warehouse sites show great promise in working with humans on repetitive and dangerous tasks to improve efficiency and productivity. However, pre-programmed and nonflexible interaction behaviors of existing robots lower the naturalness and flexibility of the collaboration process. Therefore, it is crucial to improve physical interaction behaviors of the collaborative human-robot teaming.
Our Approach: This proposal will advance the understanding of the bi-directional influence and interaction of human-robot teaming for complex physical activities in dynamic environments by developing new methods to predict worker intention via multi-modal wearable sensing, reasoning about complex human-robot-workspace interaction, and adaptively planning the robot’s motion considering both human teaming dynamics and physiological and cognitive states. More importantly, our team plans to prioritize efforts to (i) broaden the scope of IRIM’s autonomy research by incorporating psychology, cognitive, and manufacturing research not typically considered as technical robotics research areas; (ii) initiate new IRIM education, training, and outreach programs through collaboration with team members from various Georgia Tech educational and outreach programs (including Project ENGAGES, VIP, and CEISMC) as well as the AUCC (World’s largest consortia of African American private institutions of higher education) which comprises Clark Atlanta University, Morehouse College, & Spelman College; and (iii) aim for large governmental grants such as DOD MURI, NSF NRT, and NSF Future of Work programs.
-Christa M. Ernst
Aug. 30, 2024

W. Hong Yeo is leading a $3 million NSF research training program to develop a new generation of engineers focused on creating sustainable medical devices.
Georgia Tech researcher W. Hong Yeo has been awarded a $3 million grant to help develop a new generation of engineers and scientists in the field of sustainable medical devices.
“The workforce that will emerge from this program will tackle a global challenge through sustainable innovations in device design and manufacturing,” said Yeo, Woodruff Faculty Fellow and associate professor in the George W. Woodruff School of Mechanical Engineering and the Wallace H. Coulter Department of Biomedical Engineering at Georgia Tech and Emory University.
The funding, from the National Science Foundation (NSF) Research Training (NRT) program, will address the environmental impacts resulting from the mass production of medical devices, including the increase in material waste and greenhouse gas emissions.
Under Yeo’s leadership, the Georgia Tech team comprises multidisciplinary faculty: Andrés García (bioengineering), HyunJoo Oh (industrial design and interactive computing), Lewis Wheaton (biology), and Josiah Hester (sustainable computing). Together, they’ll train 100 graduate students, including 25 NSF-funded trainees, who will develop reuseable, reliable medical devices for a range of uses.
“We plan to educate students on how to develop medical devices using biocompatible and biodegradable materials and green manufacturing processes using low-cost printing technologies,” said Yeo. “These wearable and implantable devices will enhance disease diagnosis, therapeutics, rehabilitation, and health monitoring.”
Students in the program will be challenged by a comprehensive, multidisciplinary curriculum, with deep dives into bioengineering, public policy, physiology, industrial design, interactive computing, and medicine. And they’ll get real-world experience through collaborations with clinicians and medical product developers, working to create devices that meet the needs of patients and care providers.
The Georgia Tech NRT program aims to attract students from various backgrounds, fostering a diverse, inclusive environment in the classroom — and ultimately in the workforce.
The program will also introduce a new Ph.D. concentration in smart medical devices as part of Georgia Tech's bioengineering program, and a new M.S. program in the sustainable development of medical devices. Yeo also envisions an academic impact that extends beyond the Tech campus.
“Collectively, this NRT program's curriculum, combining methods from multiple domains, will help establish best practices in many higher education institutions for developing reliable and personalized medical devices for healthcare,” he said. “We’d like to broaden students' perspectives, move past the current technology-first mindset, and reflect the needs of patients and healthcare providers through sustainable technological solutions.”
News Contact
Jerry Grillo
Mar. 20, 2024
</p>")
Researcher Aaron Young makes adjustments to an experimental exoskeleton worn by then-Ph.D. student Dean Molinaro. The team used the exoskeleton to develop a unified control framework for robotic assistance devices that would allow users to put on an "exo" and go — no extensive training, tuning, or calibration required. (Photo: Candler Hobbs)
</p>")
Dean Molinaro walks up an adjustable ramp while wearing an experimental exoskeleton, demonstrating how the team collected data in their effort to develop a unified control framework for robotic assistance devices. (Photo: Candler Hobbs)
Robotic exoskeletons designed to help humans with walking or physically demanding work have been the stuff of sci-fi lore for decades. Remember Ellen Ripley in that Power Loader in Alien? Or the crazy mobile platform George McFly wore in 2015 in Back to the Future, Part II because he threw his back out?
Researchers are working on real-life robotic assistance that could protect workers from painful injuries and help stroke patients regain their mobility. So far, they have required extensive calibration and context-specific tuning, which keeps them largely limited to research labs.
Mechanical engineers at Georgia Tech may be on the verge of changing that, allowing exoskeleton technology to be deployed in homes, workplaces, and more.
A team of researchers in Aaron Young’s lab have developed a universal approach to controlling robotic exoskeletons that requires no training, no calibration, and no adjustments to complicated algorithms. Instead, users can don the “exo” and go.
Their system uses a kind of artificial intelligence called deep learning to autonomously adjust how the exoskeleton provides assistance, and they’ve shown it works seamlessly to support walking, standing, and climbing stairs or ramps. They described their “unified control framework” March 20 in Science Robotics.
“The goal was not just to provide control across different activities, but to create a single unified system. You don't have to press buttons to switch between modes or have some classifier algorithm that tries to predict that you're climbing stairs or walking,” said Young, associate professor in the George W. Woodruff School of Mechanical Engineering.
News Contact
Joshua Stewart
College of Engineering
Mar. 04, 2024

IRIM Director Seth Hutchinson at Hyundai Meta Factory Conference Delivering Keynote

IRIM Director Seth Hutchinson at Hyundai Meta Factory Conference on Panel Discussion
Hyundai Motor Group Innovation Center Singapore hosted the Meta-Factory Conference Jan. 23 – 24. It brought together academic leaders, industry experts, and manufacturing companies to discuss technology and the next generation of integrated manufacturing facilities.
Seth Hutchinson, executive director of the Institute for Robotics and Intelligent Machines at Georgia Tech, delivered a keynote lecture on “The Impacts of Today’s Robotics Innovation on the Relationship Between Robots and Their Human Co-Workers in Manufacturing Applications” — an overview of current state-of-the-art robotic technologies and future research trends for developing robotics aimed at interactions with human workers in manufacturing.
In addition to the keynote, Hutchinson also participated in the Hyundai Motor Group's Smart Factory Executive Technology Advisory Committee (E-TAC) panel on comprehensive future manufacturing directions and toured the new Hyundai Meta-Factory to observe how digital-twin technology is being applied in their human-robot collaborative manufacturing environment.
Hutchinson is a professor in the School of Interactive Computing. He received his Ph.D. from Purdue University in 1988, and in 1990 joined the University of Illinois Urbana-Champaign, where he was professor of electrical and computer engineering until 2017 and is currently professor emeritus. He has served on the Hyundai Motor Group's Smart Factory E-TAC since 2022.
Hyundai Motor Group Innovation Center Singapore is Hyundai Motor Group’s open innovation hub to support research and development of human-centered smart manufacturing processes using advanced technologies such as artificial intelligence, the Internet of Things, and robotics.
- Christa M. Ernst
Related Links
- Hyundai Newsroom Article: Link
- Event Link: https://mfc2024.com/
- Keynote Speakers: https://mfc2024.com/keynotes/
News Contact
Christa M. Ernst - Research Communications Program Manager
christa.ernst@research.gatech.edu
Sep. 21, 2023

For the 10th Demo Day, the Tech community came out in droves to support 75 Georgia Tech startups created by students, alumni, and faculty. In booths spread out in Exhibition Hall, they displayed their products, which ranged from AI and robotic training gear to fungi fashion, and more. Over four hours, more than 1,500 people filed in and out of the hall. Founders pitched their innovations to business and community leaders, as well as students and the public, eager to witness groundbreaking innovations across various industries.
Kiandra Peart, co-founder of Reinvend, said the amount of people surprised her.
“After the first VIP session was over, hundreds of people were just flooding through the door at all times,” she said. “We had to give the pitch a million times to explain it to a lot of different people, but they seemed really, really engaged, and we were also able to get a few interactions.”
Reinvend is working through a potential deal with Tech Dining on using their vending machines, which would expand food options for students after dining halls close.
Demo Day is the culmination of the 12-week summer accelerator, Startup Launch, where founders learn about entrepreneurship and build out their businesses with the support of mentors. Along with guidance from experts in business, teams receive $5,000 in optional funding and $30,000 of in-kind services. This year, the program had over 100 startups and 250 founders, continuing the growth trend for CREATE-X. The program aims to eventually support the launch of 300 startups per year.
Peart said the experience taught the team how to better pitch to potential clients and formulate a call to action after a successful interaction.
Since its inception in 2014, CREATE-X has had more than 5,000 participate in their programming, which is segmented in three areas: Learn, Make, and Launch. Besides providing resources, the program also helps founders through its rich entrepreneurial ecosystem.
“We want to increase access to entrepreneurship. That’s the heart of the program, and it’s the goal to have everyone in the Tech community to have entrepreneurial confidence. The energy and passion of our founders to solve real-world problems — it’s palpable at Demo Day. I’d say it’s the best place to see what we’re about and understand what this program offers,” said Rahul Saxena, director of CREATE-X, who also reminded founders that the connections they make here would last for years.
At its core, CREATE-X is a community geared toward innovation. Participants were at the forefront of integrating OpenAI's GPT-3 when it was not yet widely adopted. They share their insights with each other, and the program has mentors coming back from even the very first cohort. Starting with eight teams, CREATE-X has now launched more than 400 startup teams, with founders representing 38 academic majors. Its total startup portfolio valuation is above $1.9 billion.
Peart compared CREATE-X to an energy drink.
“After going through the program, I was really able to refine my ideas, talk with other people, and now that the program is over, I feel energized,” she said. “I think that having an accelerator right at home allows students who may have never considered starting a company, or didn't have access to an accelerator, to actually utilize their resources from their school and their own community to get their companies started.”
Although Demo Day just ended, CREATE-X is already gearing up for the next cohort. Applications for Startup Launch opened Aug. 31, the same day as Demo Day.
“Consider interning for yourself next summer,” said Saxena. “We know you have ideas about solutions to address global challenges. You’re at Tech; you have the talent. Let us help you with the resources and support system.”
Georgia Tech students, alumni, and faculty can apply to GT Startup Launch now. The priority deadline is Nov. 6. To learn more about CREATE-X, find CREATE-X events to build a startup team, or learn more about entrepreneurship, visit th CREATE-X website
News Contact
Breanna Durham
Marketing Strategist
May. 05, 2023
Centipedes are known for their wiggly walk. With tens to hundreds of legs, they can traverse any terrain without stopping.
“When you see a scurrying centipede, you're basically seeing an animal that inhabits a world that is very different than our world of movement,” said Daniel Goldman, the Dunn Family Professor in the School of Physics. “Our movement is largely dominated by inertia. If I swing my leg, I land on my foot and I move forward. But in the world of centipedes, if they stop wiggling their body parts and limbs, they basically stop moving instantly.”
Intrigued to see if the many limbs could be helpful for locomotion in this world, a team of physicists, engineers, and mathematicians at the Georgia Institute of Technology are using this style of movement to their advantage. They developed a new theory of multilegged locomotion and created many-legged robotic models, discovering the robot with redundant legs could move across uneven surfaces without any additional sensing or control technology as the theory predicted.
These robots can move over complex, bumpy terrain — and there is potential to use them for agriculture, space exploration, and even search and rescue.
The researchers presented their work in the papers, “Multilegged Matter Transport: A Framework for Locomotion on Noisy Landscapes,” in Science in May and “Self-Propulsion via Slipping: Frictional Swimming in Multilegged Locomotors,” in Proceedings of the National Academy of Sciences in March.
A Leg Up
For the Science paper, the researchers were motivated by mathematician Claude Shannon’s communication theory, which demonstrates how to reliably transmit signals over distance, to understand why a multilegged robot was so successful at locomotion. The theory of communication suggests that one way to ensure a message gets from point A to point B on a noisy line isn’t to send it as an analog signal, but to break it into discrete digital units and repeat these units with an appropriate code.
“We were inspired by this theory, and we tried to see if redundancy could be helpful in matter transportation,” said Baxi Chong, a physics postdoctoral researcher. “So, we started this project to see what would happen if we had more legs on the robot: four, six, eight legs, and even 16 legs.”
A team led by Chong, including School of Mathematics postdoctoral fellow Daniel Irvine and Professor Greg Blekherman, developed a theory that proposes that adding leg pairs to the robot increases its ability to move robustly over challenging surfaces — a concept they call spatial redundancy. This redundancy makes the robot’s legs successful on their own without the need for sensors to interpret the environment. If one leg falters, the abundance of legs keeps it moving regardless. In effect, the robot becomes a reliable system to transport itself and even a load from A to B on difficult or “noisy” landscapes. The concept is comparable to how punctuality can be guaranteed on wheeled transport if the track or rail is smooth enough but without having to engineer the environment to create this punctuality.
“With an advanced bipedal robot, many sensors are typically required to control it in real time,” Chong said. “But in applications such as search and rescue, exploring Mars, or even micro robots, there is a need to drive a robot with limited sensing. There are many reasons for such sensor-free initiative. The sensors can be expensive and fragile, or the environments can change so fast that it doesn’t allow enough sensor-controller response time.”
To test this, Juntao He, a Ph.D. student in robotics, conducted a series of experiments where he and Daniel Soto, a master’s graduate in the George W. Woodruff School of Mechanical Engineering, built terrains to mimic an inconsistent natural environment. He then tested the robot by increasing its number of legs by two each time, starting with six and eventually expanding to 16. As the leg count increased, the robot could more agilely move across the terrain, even without sensors, as the theory predicted. Eventually, they tested the robot outdoors on real terrain, where it was able to traverse in a variety of environments.
“It's truly impressive to witness the multilegged robot's proficiency in navigating both lab-based terrains and outdoor environments,” Juntao said. “While bipedal and quadrupedal robots heavily rely on sensors to traverse complex terrain, our multilegged robot utilizes leg redundancy and can accomplish similar tasks with open-loop control.”
Next Steps
The researchers are already applying their discoveries to farming. Goldman has co-founded a company that aspires to use these robots to weed farmland where weedkillers are ineffective.
“They’re kind of like a Roomba but outside for complex ground,” Goldman said. “A Roomba works because it has wheels that function well on flat ground. Until the development of our framework, we couldn’t confidently predict locomotor reliability on bumpy, rocky, debris-ridden terrain. We now have the beginnings of such a scheme, which could be used to ensure that our robots traverse a crop field in a certain amount of time.”
The researchers also want to refine the robot. They know why the centipede robot framework is functional, but now they’re determining the optimal number of legs to achieve motion without sensing in a way that is cost-effective yet still retains the benefits.
“In this paper, we asked, ‘How do you predict the minimum number of legs to achieve such tasks?’” Chong said. “Currently we only prove that the minimum number exists, but we don't know that exact number of legs needed. Further, we need to better understand the tradeoff between energy, speed, power, and robustness in such a complex system.”
CITATION:
Baxi Chong et al., Multilegged matter transport: A framework for locomotion on noisy landscapes.Science380,509-515(2023).DOI:10.1126/science.ade4985
News Contact
Tess Malone, Senior Research Writer/Editor
Mar. 10, 2023

This news release first appeared in the University of Arkansas Division of Agriculture newsroom, and has been tailored for Georgia Tech readers.
Researchers at Georgia Tech, the University of Arkansas System, the University of Nebraska-Lincoln, and Fort Valley State University in Georgia were awarded a $5 million grant to increase use of artificial intelligence and robotics in chicken processing to reduce waste in deboning and detect pathogens.
The grant from the U.S. Department of Agriculture’s National Institute of Food and Agriculture will establish the Center for Scalable and Intelligent Automation in Poultry Processing. The center, led by the University of Arkansas System Division of Agriculture, will join researchers from five institutions in three states in efforts to adapt robotic automation to chicken meat processing.
Douglas Britton, manager of the Agricultural Technology Research Program at the Georgia Tech Research Institute (GTRI), said his team was very excited to work on this project with experts at the four other institutions.
“The ultimate goal is to drive transformational innovation into the poultry and meat processing industry through automation, robotics, AI, and VR technologies,” Britton said. “Building on years of work in the GTRI Agricultural Technology Research Program, we are pleased to see that the USDA-NIFA has chosen this team to continue these efforts.”
Georgia Tech is a major partner in the project, and was awarded $2 million to focus on automating the processing lines that turn chickens into meat, said Jeyam Subbiah, professor and head of the food science department for the Division of Agriculture and the Dale Bumpers College of Agricultural, Food and Life Sciences at the University of Arkansas, and director of the project. The grant is for four years.
The Arkansas Agricultural Experiment Station, the research arm of the Division of Agriculture, will receive $2.2 million from the grant primarily to focus on food safety automation for poultry processing plants.
The remaining grant money will be divided between Julia McQuillan, Willa Cather professor of sociology at the University of Nebraska-Lincoln, and Brou Kuoakou, associate dean for research at Fort Valley State University in Georgia.
Jeff Buhr, a USDA Agricultural Research Service scientist, will contribute his expertise in broiler physiology to guide robotic deboning of meat, Subbiah said.
Georgia is the nation’s top broiler producer. Arkansas is number 3, according to 2021 figures from USDA.
Meeting the challenge
The recent impetus to automate chicken processing began with the Covid-19 pandemic, Subbiah said. The illness spread quickly among workers on the processing line. Since the worst of the pandemic, the poultry industry, like many others, has been having trouble hiring enough workers.
“Poultry processing lines began 70 to 80 years ago,” Subbiah said. “Since then, there have been only incremental changes in technology. Today, there’s a need for transformative change.”
Humans can feel when a knife hits a bone. In contrast, existing automation in poultry processing, like deboners, wastes a lot of meat.
“Human deboners leave about 13 percent of meat on the bones,” Subbiah said. “Automated deboners leave 16 to 17 percent. On an industrial scale, that’s a significant loss in value. We will use artificial intelligence and virtual reality to improve precision and reduce wastage.”
Automation can relieve labor shortages, Subbiah said. It also allows plants to locate in rural areas with a smaller labor force but nearer poultry houses and with lower property costs.
Initially, people working remotely may help advance robotic processing. Subbiah envisions workers logging on from home with virtual-reality goggles and haptics gloves to control robots located miles away.
While working remotely, the labor force will teach artificial intelligence how to cut up chickens of varying sizes and shapes.
“Automated machines right now are programmed to debone or cut up chickens based on an average size and shape. But no chicken is that size or shape,” Subbiah said. “Robot-wielded knives cut meat poorly. The machines have to learn how to adjust to the reality of random sizes and shapes.”
Georgia Tech’s participating scientists are all part of GTRI:
- Douglas Britton, manager of the Agricultural Technology Research Program
- Colin Trevor Usher, senior research scientist and branch head of robotics systems and technology, Agricultural Technology Research Program
- Ai-Ping Hu, principal research engineer, Agricultural Technology Research Program
- Konrad Ahlin, research engineer, Intelligent Sustainable Technologies Division
- Michael Park, research engineer, Intelligent Sustainable Technologies Division
- Benjamin Joffe, research scientist, Intelligent Sustainable Technologies Division
- Shreyes Melkote, the Morris M. Bryan, Jr. Professorship in Mechanical Engineering, associate director of the Georgia Tech Manufacturing Institute and executive director of the Novelis Innovation Hub
“We are thrilled to partner with our colleagues here in the Division of Agriculture, as well as our colleagues at Georgia Tech and the other participating institutions on this exciting project,” said David Caldwell, head of the Division of Agriculture’s poultry science department and director of the Center of Excellence for Poultry Science.
“We expect the findings from these coordinated research projects will be impactful for our stakeholders in the commercial poultry industry here in Northwest Arkansas and throughout the entire industry,” Caldwell said. “This project will help keep moving technology forward in processing and food safety of poultry.”
For more information about the project, see the original press release on the University of Arkansas Division of Agriculture website.
News Contact
Catherine Barzler, Senior Research Writer and Editor
Jan. 10, 2023
Artificial intelligence is already making headlines in the new year with the box office success of the movie M3GAN. Along with a TikTok dance craze and lots of laughs, the over-the-top horror movie/dark comedy about an AI-powered robot that runs amok is also inspiring discussion about the growing presence and impact of artificial intelligence in everyday life.
From the movie house to the warehouse to your house, AI seems like it's everywhere. That's because with a steady stream of new research and innovative applications reaching into nearly every industry and business sector, it is everywhere. Nevertheless, AI still holds enormous potential as the field continues to evolve.
To get a sense of what this evolution could look like in 2023, we turned to a small group of Ph.D. students from the College of Computing community that are currently pushing foundational and applied AI research forward in a broad spectrum of disciplines and fields.
The students shared their opinions on where AI might be headed in the new year, what some of the big tech stories could be, and why ethics in AI are so critically important.
Where will artificial intelligence and machine learning have the most impact in 2023?
"Artificial intelligence and machine learning will continue to have a huge impact on manufacturing and warehouses with labor shortages and worker turnover continuing to be a concern as more manufacturing and operations jobs are brought back to the United States from overseas. Additionally, AI/ML will continue to help ensure that manufacturing and warehouse facilities are operating as efficiently as possible from energy and material savings to worker safety and parts quality." – Zoe Klesmith Alexander, computational science and engineering Ph.D. student
"Right now, deep learning is on a trajectory to transform the creation space. Artwork and images, videos, data representation and storytelling, co-authoring, and summarizing documents... It's gotten really good." – Ben Hoover, machine learning Ph.D. student
"I think machine learning and AI will keep playing a huge role in how the world and society will be shaped over the next decade in many ways. It will make many other fields more efficient through ML and AI tools we are developing. In 2023, I think ML and AI will have the most impact on social media platforms, helping reduce hate speech, rumor spread, etc." – Agam A. Shah, machine learning Ph.D. student
"One of the big impacts this year may be driverless cars being in your neighborhood. Otherwise, it will be a slow steady drip of GPT3 and other OpenAI models suffusing all applications, making programmers much faster, making journalists faster, making academic articles and lit reviews much faster. We're at a 4th grader level, and I hope by the end of this year we'll be at the 6th grader level. Also, indoor turn-by-turn navigation will be everywhere in 2023 as well." – Brandon Biggs, human-centered computing Ph.D. student
What will be some of the big tech stories in 2023?
"ChatGPT and the GitHub Copilot lawsuit will keep making it into the news and cause more controversies. In general, AI ethics will become more important and get more focus as the technology keeps advancing." – Fabian Fleischer, cybersecurity, and privacy Ph.D. student
"Driverless car fleets will be coming to a city near you. A new battery technology will allow phones to keep their charge for a week. Meta realizes virtual reality (VR) head-mounted displays are for a limited market and uses headphones and phones to provide VR experiences." – Brandon Biggs
What’s an issue or industry that you think could benefit from a computing solution?
"Our reinterpretation of modern deep learning as energy-based associative memories has the potential to transform any industry that relies on foundation models -- giant architectures that require models that are "self-supervised" (learn on their own from data)." – Ben Hoover
"Inclusion in everything. Over 90 percent of websites on the internet have elements that are inaccessible to 25 percent of the world's population who have disabilities. Inclusive design will be the most important area where technology can be redesigned and created to have multiple sensory modalities and be properly programmed." – Brandon Biggs
"Currently, financial markets are far from efficient because they do not fully incorporate information available in large unstructured text data. With the latest development in natural language processing techniques, we can better understand the economy and therefore price financial markets better." – Agam A. Shah
There’s been increasing recognition of the vital role ethics should play in artificial intelligence. How do you see this issue evolving in the next year?
"Specifically in my research, I think explainable AI (XAI) is very important, especially if non-experts in ML will be using black-box ML solutions in a factory. It will be important for humans to trust and to understand the models especially if the models are being using to monitor quality on a safety-critical part.
"Additionally, using XAI for human interaction with robots that utilize deep learning to make decisions will be increasingly important as technologies like collaborative robots (cobots) are integrated into factories. I think in my area of research that it is always important to use automation to aid humans in jobs that are safe for humans to do and not to replace them." – Zoe Klesmith Alexander
"Big data is pretty much at its peak. Deep data, where your Alexa knows everything about you, or your phone knows everything about you, and rather than saying 'other people who watched this show liked this show,' it's going to say, 'I know you liked these shows, I think you'll like this show because of these reasons, one of which is because other people who liked all these other shows liked this show.' The ethical element will be how much of this data should these models use, and are people going to build a personal dataset that they can share with other apps, or is each app going to need to build their own dataset? The ethical question is who owns this data." – Brandon Biggs
"I think ethics will become more and more important going forward. We are making huge breakthroughs in machine learning and artificial intelligence, but the systems we are creating are producing racist, sexist, and stereotypical results. For example, a recent system, Galactica, developed by Facebook (Meta) is powerful. It can produce research articles by just simply providing it with the title. It comes with some serious ethical concerns, in some cases, it produces racist, sexist text. So, as we will keep developing better models and making success in parallel, we need to always keep in mind the ethical implications of these models." – Agam A. Shah
What research are you working on that you think people should know about or will have impact in 2023?
"Part of my research focuses on data-driven modeling of additive manufacturing processes to better control dimensional quality of the final part. Another part of my research focuses on detecting anomalies in real-time using computer vision and machine learning for both warehouses and manufacturing processes." – Zoe Klesmith Alexander
"Right now, deep learning is built on feed-forward mathematical operations that have little resemblance to the brain. I am working on a physics inspired approach to deep learning built around recurrent networks and energy functions. These architectures have the same mathematical foundation as the famous, biologically plausible Hopfield Network." – Ben Hoover
"I am currently working on two projects which, in my opinion, will have an impact in 2023. In one project, we are measuring the exposure of public firms to ongoing inflation. We are also understanding how inflation affects different firms differently based on the pricing power of the firm. As inflation is the highest in the last 40 years, our study is highly relevant now and in the coming years till we get inflation back in control.
"The second work is related to the first work in some ways. As inflation is rising, to control the inflation Federal Reserve Bank is tightening its monetary policy. In our second work, we are measuring the stance of monetary policy (measuring hawkish vs dovish stance) of the Fed using state-of-the-art NLP models to see its impact in various financial markets (Treasury market, Stock market, Crypto market, etc.)" – Agam A. Shah
News Contact
Ben Snedeker, Comms. Mgr. II
albert.snedeker@cc.gatech.edu
Apr. 13, 2022


By Frida Carrera
On Wednesday, April 13th 2022, the Undergraduate Research Opportunities Program (UROP) hosted the 16th annual Spring Undergraduate Research Symposium. UROP’s annual symposium is Georgia Tech’s largest undergraduate research colloquium and allows students to present their research and gain valuable skills and presentation experience. Each year the symposium also presents awards to the top poster and oral presentation from each college and honors the Outstanding Undergraduate Researcher (OUR) from each college. And with over 40 oral presentations and nearly 90 poster presentations, this year’s symposium proved to be another success for UROP and Georgia Tech.
This year the symposium was held in Exhibition Hall and opened with an introduction and keynote address to students, faculty, and other non-presenters. Shortly after, the event moved into the poster presentations segment where undergraduate students displayed their research to judges, faculty, and other attendees. The oral presentations followed soon after and gave student researchers the opportunity to go more in-depth with their research and findings and answer any questions the judges and attendees had. To end the event, sponsoring colleges and departments recognized Outstanding Undergraduate Researchers from their respective colleges. Additionally, the symposium judges were tasked with selecting the top student researchers having exceptional poster and oral presentations.
Any Georgia Tech undergraduate student interested in presenting their research is encouraged to apply for future symposiums and to build on research presentation skills, connect with other undergraduate researchers and faculty, and the chance to be recognized with awards by members of the Georgia Tech research community. UROP also hosts other research-related events and workshops throughout the school year to assist undergraduate students interested in research and build on their passions!
To view the list of awardees and pictures from the event visit: https://symposium.urop.gatech.edu/awards/
To learn more about undergraduate research at Georgia Tech visit: https://urop.gatech.edu/