Apr. 23, 2025
, associate chair for Faculty Development and professor in the Department of Biomedical Engineering; W. Hong Yeo, Harris Saunders, Jr. Professor in the George W. Woodruff School of Mechanical Engineering.</p>")
Michelle LaPlaca (left), associate chair for Faculty Development and professor in the Department of Biomedical Engineering; W. Hong Yeo, Harris Saunders, Jr. Professor in the George W. Woodruff School of Mechanical Engineering.
Georgia Tech professors Michelle LaPlaca and W. Hong Yeo have been selected as recipients of Peterson Professorships with the Children’s Healthcare of Atlanta Pediatric Technology Center (PTC) at Georgia Tech. The professorships, supported by the G.P. “Bud” Peterson and Valerie H. Peterson Faculty Endowment Fund, are meant to further energize the Georgia Tech and Children’s partnership by engaging and empowering researchers involved in pediatrics.
In a joint statement, PTC co-directors Wilbur Lam and Stanislav Emelianov said, “The appointment of Dr. LaPlaca and Dr. Yeo as Peterson Professors exemplifies the vision of Bud and Valerie Peterson — advancing innovation and collaboration through the Pediatric Technology Center to bring breakthrough ideas from the lab to the bedside, improving the lives of children and transforming healthcare.”
LaPlaca is a professor and associate chair for Faculty Development in the Department of Biomedical Engineering, a joint department between Georgia Tech and Emory University. Her research is focused on traumatic brain injury and concussion, concentrating on sources of heterogeneity and clinical translation. Specifically, she is working on biomarker discovery, the role of the glymphatic system, and novel virtual reality neurological assessments.
“I am thrilled to be chosen as one of the Peterson Professors and appreciate Bud and Valerie Peterson’s dedication to pediatric research,” she said. “The professorship will allow me to broaden research in pediatric concussion assessment and college student concussion awareness, as well as to identify biomarkers in experimental models of brain injury.”
In addition to the research lab, LaPlaca will work with an undergraduate research class called Concussion Connect, which is part of the Vertically Integrated Projects program at Georgia Tech.
“Through the PTC, Georgia Tech and Children’s will positively impact brain health in Georgia’s pediatric population,” said LaPlaca.
Yeo is the Harris Saunders, Jr. Professor in the George W. Woodruff School of Mechanical Engineering and the director of the Wearable Intelligent Systems and Healthcare Center at Georgia Tech. His research focuses on nanomanufacturing and membrane electronics to develop soft biomedical devices aimed at improving disease diagnostics, therapeutics, and rehabilitation.
“I am truly honored to be awarded the Peterson Professorship from the Children’s PTC at Georgia Tech,” he said. “This recognition will greatly enhance my research efforts in developing soft bioelectronics aimed at advancing pediatric healthcare, as well as expand education opportunities for the next generation of undergraduate and graduate students interested in creating innovative medical devices that align seamlessly with the recent NSF Research Traineeship grant I received. I am eager to contribute to the dynamic partnership between Georgia Tech and Children’s Healthcare of Atlanta and to empower innovative solutions that will improve the lives of children.”
The Peterson Professorships honor the former Georgia Tech President and First Lady, whose vision for the importance of research in improving pediatric healthcare has had an enormous positive impact on the care of pediatric patients in our state and region.
The Children’s PTC at Georgia Tech brings clinical experts from Children’s together with Georgia Tech scientists and engineers to develop technological solutions to problems in the health and care of children. Children’s PTC provides extraordinary opportunities for interdisciplinary collaboration in pediatrics, creating breakthrough discoveries that often can only be found at the intersection of multiple disciplines. These collaborations also allow us to bring discoveries to the clinic and the bedside, thereby enhancing the lives of children and young adults. The mission of the PTC is to establish the world’s leading program in the development of technological solutions for children’s health, focused on three strategic areas that will have a lasting impact on Georgia’s kids and beyond.
Apr. 10, 2025
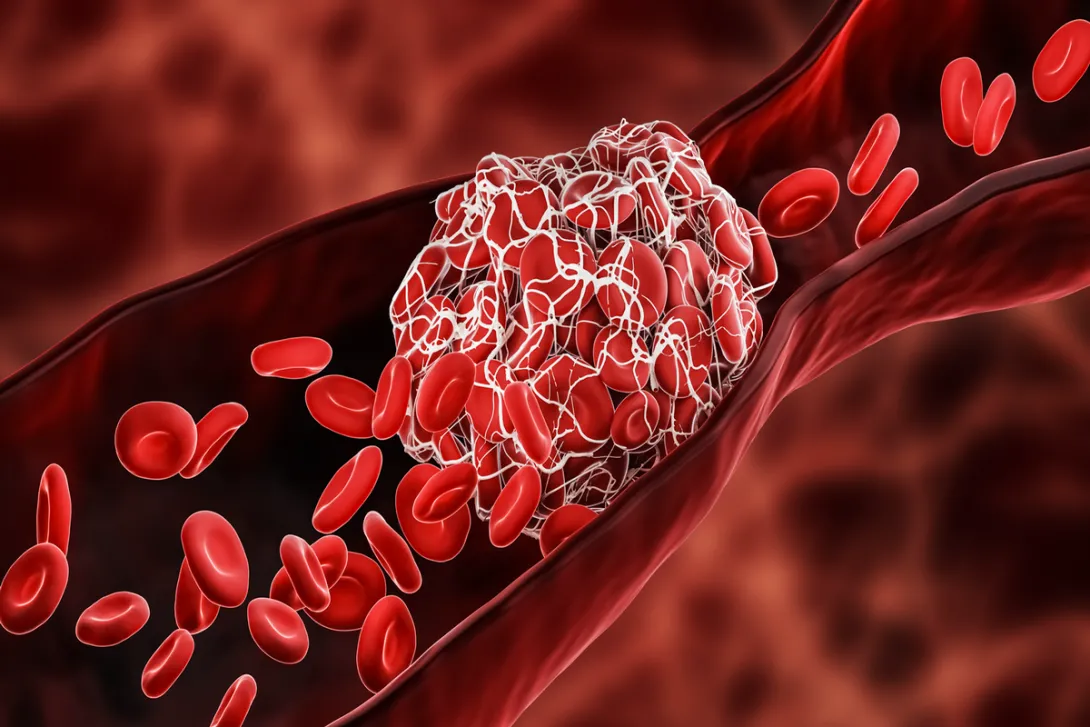
In a groundbreaking study published in Nature, researchers from Georgia Tech and Emory University have developed a new model that could enable precise, life-saving medication delivery for blood clot patients. The novel technique uses a 3D microchip
Wilbur Lam, professor at Georgia Tech and Emory University, and a clinician at Children’s Healthcare of Atlanta, led the study. He worked closely with Yongzhi Qiu, an assistant professor in the Department of Pediatrics at Emory University School of Medicine.
The significance of the thromboinflammation-on-a-chip model, is that it mimics clots in a human-like way, allowing them to last for months and resolve naturally. This model helps track blood clots and more effectively test treatments for conditions including sickle cell anemia, strokes, and heart attacks.
News Contact
Amelia Neumeister | Research Communications Program Manager
Mar. 14, 2025

Over 5,000 people attended Georgia Tech's Celebrate STEAM event on March 8, which showcased more than 60 demonstrations in science, technology, engineering, art, and mathematics.
Dec. 18, 2024

As we go through our daily routines of work, chores, errands and leisure pursuits, most of us take our mobility for granted. Conversely, many people suffer from permanent or temporary mobility issues due to neurological disorders, stroke, injury, and age-related causes. Research in the field of robotic exoskeletons has shown significant potential to provide assistive support for patients with permanent mobility constraints, as well as an effective additional tool for rehabilitation and recovery after injury.
Though the field has made great progress in the hardware and devices for these assistive technologies, there are limitations in ease of use and in the ability to move from walking to running, from flat ground to slopes and stairs, and across different terrains. Recent developments to create exoskeleton controllers that are more responsive to the user’s environment via user-based variables such as gait and slope calculations provide rapid yet imprecise outputs. More recent inquiry into data-driven improvements such as vision-based labeling and classification are extremely promising additions in the goal to develop a true synchronous user and device interface. A major hindrance to this data-driven approach is the need for burdensome mounted cameras and on-board computing to allow for real-time in use adjustments to the environmental terrain encountered.
In order to address these barriers, Aaron Young, Associate Professor in the Woodruff School of Mechanical Engineering and Director of the Exoskeleton and Prosthetic Intelligent Controls (EPIC) Lab, and Dawit Lee, Postdoctoral Scholar at Stanford, have created an artificial intelligence (AI)-based universal exoskeleton controller that uses information from onboard mechanical sensors without the added weight and complexity of mounted vision based systems. The new work, published in Science Advances (Link to Be Added), presents a controller that holistically captures the major variations encountered during community walking in real-time. The team combined data from the Americans with Disabilities Act (ADA) building guidelines that characterize ambulatory terrains in slope level degrees with a gait phase estimator to achieve dynamic switching of assistance types between multiple terrains and slopes and delivery to the user with little to no delay.
In this work, we have created a new, open-source knee exoskeleton design that is intended to support community mobility. Knee assist devices have tremendous value in activities such as sit-to-stand, stairs, and ramps where we use our biological knees substantially to accomplish these tasks. The neat accomplishment in this work is that by leveraging AI, we avoid the need to classify these different modes discretely but rather have a single continuous variable (in this case rise over run of the surface) to enable continuous and unified control over common ambulatory tasks such as walking, stairs, and ramps. We demonstrate that on novel users of the device, we can track both the environment and the user’s gait state with very high accuracy out of the lab in community settings. It is an exciting time in the field as we see more studies, such as this one, showing promise in tackling real-world mobility challenges
The assistance approach using our intelligent controller, presented in this work, provides users with support at the right timing and with a magnitude that closely matches the varying biomechanical effort they produce as they move through the community. Our assistance approach was preferred for community navigation and was more effective in reducing the user’s energy consumption compared to conventional methods. We also open-sourced the design of the robotic knee exoskeleton hardware and the dataset used to train the models with this publication which allows other researchers to build upon our developments and further advance the field. This work demonstrates an exciting example of AI integration into a wearable robotic system, showcasing its successful outcomes and significant potential.
- Dawit Lee; Postdoctoral Scholar, Stanford
Using this combination of a universal slope estimator and a gait phase estimator, the team achieved results in the dynamic modulation of exoskeleton assistance that have never been achieved by previous approaches and moves the field closer to creating an adaptive and effective assistive technology that seamlessly integrates into the daily lives of individuals, promoting enhanced mobility and overall well-being. This work also has the potential to enable a mode-specific assistance approach tailored to the user’s specific biomechanical needs.
- Christa M. Ernst; Research Communications Program Manager
Original Publication
Dawit Lee, Sanghyub Lee, and Aaron J. Young, “AI-Driven Universal Lower-Limb Exoskeleton System for Community Ambulation,” Science Advances
Prior Related Work
D. Lee, I. Kang, D. D. Molinaro, A. Yu, A. J. Young, Real-time user-independent slope prediction using deep learning for modulation of robotic knee exoskeleton assistance. IEEE Robot. Autom. Lett. 6, 3995–4000 (2021).
Funding Provided by
NIH Director’s New Innovator Award DP2-HD111709
Oct. 01, 2024

The Institute for Robotics and Intelligent Machines (IRIM) launched a new initiatives program, starting with several winning proposals, with corresponding initiative leads that will broaden the scope of IRIM’s research beyond its traditional core strengths. A major goal is to stimulate collaboration across areas not typically considered as technical robotics, such as policy, education, and the humanities, as well as open new inter-university and inter-agency collaboration routes. In addition to guiding their specific initiatives, these leads will serve as an informal internal advisory body for IRIM. Initiative leads will be announced annually, with existing initiative leaders considered for renewal based on their progress in achieving community building and research goals. We hope that initiative leads will act as the “faculty face” of IRIM and communicate IRIM’s vision and activities to audiences both within and outside of Georgia Tech.
Meet 2024 IRIM Initiative Leads
Stephen Balakirsky; Regents' Researcher, Georgia Tech Research Institute & Panagiotis Tsiotras; David & Andrew Lewis Endowed Chair, Daniel Guggenheim School of Aerospace Engineering | Proximity Operations for Autonomous Servicing
Why It Matters: Proximity operations in space refer to the intricate and precise maneuvers and activities that spacecraft or satellites perform when they are in close proximity to each other, such as docking, rendezvous, or station-keeping. These operations are essential for a variety of space missions, including crewed spaceflights, satellite servicing, space exploration, and maintaining satellite constellations. While this is a very broad field, this initiative will concentrate on robotic servicing and associated challenges. In this context, robotic servicing is composed of proximity operations that are used for servicing and repairing satellites in space. In robotic servicing, robotic arms and tools perform maintenance tasks such as refueling, replacing components, or providing operation enhancements to extend a satellite's operational life or increase a satellite’s capabilities.
Our Approach: By forming an initiative in this important area, IRIM will open opportunities within the rapidly evolving space community. This will allow us to create proposals for organizations ranging from NASA and the Defense Advanced Research Projects Agency to the U.S. Air Force and U.S. Space Force. This will also position us to become national leaders in this area. While several universities have a robust robotics program and quite a few have a strong space engineering program, there are only a handful of academic units with the breadth of expertise to tackle this problem. Also, even fewer universities have the benefit of an experienced applied research partner, such as the Georgia Tech Research Institute (GTRI), to undertake large-scale demonstrations. Georgia Tech, having world-renowned programs in aerospace engineering and robotics, is uniquely positioned to be a leader in this field. In addition, creating a workshop in proximity operations for autonomous servicing will allow the GTRI and Georgia Tech space robotics communities to come together and better understand strengths and opportunities for improvement in our abilities.
Matthew Gombolay; Assistant Professor, Interactive Computing | Human-Robot Society in 2125: IRIM Leading the Way
Why It Matters: The coming robot “apocalypse” and foundation models captured the zeitgeist in 2023 with “ChatGPT” becoming a topic at the dinner table and the probability occurrence of various scenarios of AI driven technological doom being a hotly debated topic on social media. Futuristic visions of ubiquitous embodied Artificial Intelligence (AI) and robotics have become tangible. The proliferation and effectiveness of first-person view drones in the Russo-Ukrainian War, autonomous taxi services along with their failures, and inexpensive robots (e.g., Tesla’s Optimus and Unitree’s G1) have made it seem like children alive today may have robots embedded in their everyday lives. Yet, there is a lack of trust in the public leadership bringing us into this future to ensure that robots are developed and deployed with beneficence.
Our Approach: This proposal seeks to assemble a team of bright, savvy operators across academia, government, media, nonprofits, industry, and community stakeholders to develop a roadmap for how we can be the most trusted voice to guide the public in the next 100 years of innovation in robotics here at the IRIM. We propose to carry out specific activities that include conducting the activities necessary to develop a roadmap about Robots in 2125: Altruistic and Integrated Human-Robot Society. We also aim to build partnerships to promulgate these outcomes across Georgia Tech’s campus and internationally.
Gregory Sawicki; Joseph Anderer Faculty Fellow, School of Mechanical Engineering & Aaron Young; Associate Professor, Mechanical Engineering | Wearable Robotic Augmentation for Human Resilience
Why It Matters: The field of robotics continues to evolve beyond rigid, precision-controlled machines for amplifying production on manufacturing assembly lines toward soft, wearable systems that can mediate the interface between human users and their natural and built environments. Recent advances in materials science have made it possible to construct flexible garments with embedded sensors and actuators (e.g., exosuits). In parallel, computers continue to get smaller and more powerful, and state-of-the art machine learning algorithms can extract useful information from more extensive volumes of input data in real time. Now is the time to embed lean, powerful, sensorimotor elements alongside high-speed and efficient data processing systems in a continuous wearable device.
Our Approach: The mission of the Wearable Robotic Augmentation for Human Resilience (WeRoAHR) initiative is to merge modern advances in sensing, actuation, and computing technology to imagine and create adaptive, wearable augmentation technology that can improve human resilience and longevity across the physiological spectrum — from behavioral to cellular scales. The near-term effort (~2-3 years) will draw on Georgia Tech’s existing ecosystem of basic scientists and engineers to develop WeRoAHR systems that will focus on key targets of opportunity to increase human resilience (e.g., improved balance, dexterity, and stamina). These initial efforts will establish seeds for growth intended to help launch larger-scale, center-level efforts (>5 years).
Panagiotis Tsiotras; David & Andrew Lewis Endowed Chair, Daniel Guggenheim School of Aerospace Engineering & Sam Coogan; Demetrius T. Paris Junior Professor, School of Electrical and Computer Engineering | Initiative on Reliable, Safe, and Secure Autonomous Robotics
Why It Matters: The design and operation of reliable systems is primarily an integration issue that involves not only each component (software, hardware) being safe and reliable but also the whole system being reliable (including the human operator). The necessity for reliable autonomous systems (including AI agents) is more pronounced for “safety-critical” applications, where the result of a wrong decision can be catastrophic. This is quite a different landscape from many other autonomous decision systems (e.g., recommender systems) where a wrong or imprecise decision is inconsequential.
Our Approach: This new initiative will investigate the development of protocols, techniques, methodologies, theories, and practices for designing, building, and operating safe and reliable AI and autonomous engineering systems and contribute toward promoting a culture of safety and accountability grounded in rigorous objective metrics and methodologies for AI/autonomous and intelligent machines designers and operators, to allow the widespread adoption of such systems in safety-critical areas with confidence. The proposed new initiative aims to establish Tech as the leader in the design of autonomous, reliable engineering robotic systems and investigate the opportunity for a federally funded or industry-funded research center (National Science Foundation (NSF) Science and Technology Centers/Engineering Research Centers) in this area.
Colin Usher; Robotics Systems and Technology Branch Head, GTRI | Opportunities for Agricultural Robotics and New Collaborations
Why It Matters: The concepts for how robotics might be incorporated more broadly in agriculture vary widely, ranging from large-scale systems to teams of small systems operating in farms, enabling new possibilities. In addition, there are several application areas in agriculture, ranging from planting, weeding, crop scouting, and general growing through harvesting. Georgia Tech is not a land-grant university, making our ability to capture some of the opportunities in agricultural research more challenging. By partnering with a land-grant university such as the University of Georgia (UGA), we can leverage this relationship to go after these opportunities that, historically, were not available.
Our Approach: We plan to build collaborations first by leveraging relationships we have already formed within GTRI, Georgia Tech, and UGA. We will achieve this through a significant level of networking, supported by workshops and/or seminars with which to recruit faculty and form a roadmap for research within the respective universities. Our goal is to identify and pursue multiple opportunities for robotics-related research in both row-crop and animal-based agriculture. We believe that we have a strong opportunity, starting with formalizing a program with the partners we have worked with before, with the potential to improve and grow the research area by incorporating new faculty and staff with a unified vision of ubiquitous robotics systems in agriculture. We plan to achieve this through scheduled visits with interested faculty, attendance at relevant conferences, and ultimately hosting a workshop to formalize and define a research roadmap.
Ye Zhao; Assistant Professor, School of Mechanical Engineering | Safe, Social, & Scalable Human-Robot Teaming: Interaction, Synergy, & Augmentation
Why It Matters: Collaborative robots in unstructured environments such as construction and warehouse sites show great promise in working with humans on repetitive and dangerous tasks to improve efficiency and productivity. However, pre-programmed and nonflexible interaction behaviors of existing robots lower the naturalness and flexibility of the collaboration process. Therefore, it is crucial to improve physical interaction behaviors of the collaborative human-robot teaming.
Our Approach: This proposal will advance the understanding of the bi-directional influence and interaction of human-robot teaming for complex physical activities in dynamic environments by developing new methods to predict worker intention via multi-modal wearable sensing, reasoning about complex human-robot-workspace interaction, and adaptively planning the robot’s motion considering both human teaming dynamics and physiological and cognitive states. More importantly, our team plans to prioritize efforts to (i) broaden the scope of IRIM’s autonomy research by incorporating psychology, cognitive, and manufacturing research not typically considered as technical robotics research areas; (ii) initiate new IRIM education, training, and outreach programs through collaboration with team members from various Georgia Tech educational and outreach programs (including Project ENGAGES, VIP, and CEISMC) as well as the AUCC (World’s largest consortia of African American private institutions of higher education) which comprises Clark Atlanta University, Morehouse College, & Spelman College; and (iii) aim for large governmental grants such as DOD MURI, NSF NRT, and NSF Future of Work programs.
-Christa M. Ernst
May. 10, 2024
 and Mechanical Engineering Associate Professor Aaron Young.</p>")
Mechanical Engineering and Biological Sciences Associate Professor Gregory Sawicki (left) and Mechanical Engineering Associate Professor Aaron Young.
Faculty from the George W. Woodruff School of Mechanical Engineering, including Associate Professors Gregory Sawicki and Aaron Young, have been awarded a five-year, $2.6 million Research Project Grant (R01) from the National Institutes of Health (NIH).
“We are grateful to our NIH sponsor for this award to improve treatment of post-stroke individuals using advanced robotic solutions,” said Young, who is also affiliated with Georgia Tech's Neuro Next Initiative.
The R01 will support a project focused on using optimization and artificial intelligence to personalize exoskeleton assistance for individuals with symptoms resulting from stroke. Sawicki and Young will collaborate with researchers from the Emory Rehabilitation Hospital including Associate Professor Trisha Kesar.
“As a stroke researcher, I am eagerly looking forward to making progress on this project, and paving the way for leading-edge technologies and technology-driven treatment strategies that maximize functional independence and quality of life of people with neuro-pathologies," said Kesar.
The intervention for study participants will include a training therapy program that will use biofeedback to increase the efficiency of exosuits for wearers.
Kinsey Herrin, senior research scientist in the Woodruff School and Neuro Next Initiative affiliate, explained the extended benefits of the study, including being able to increase safety for stroke patients who are moving outdoors. “One aspect of this project is testing our technologies on stroke survivors as they're walking outside. Being outside is a small thing that many of us take for granted, but a devastating loss for many following a stroke.”
Sawicki, who is also an associate professor in the School of Biological Sciences and core faculty in Georgia Tech's Institute for Robotics and Intelligent Machines, is also looking forward to the project. "This new project is truly a tour de force that leverages a highly talented interdisciplinary team of engineers, clinical scientists, and prosthetics/orthotics experts who all bring key elements needed to build assistive technology that can work in real-world scenarios."
News Contact
Chloe Arrington
Communications Officer II
George W. Woodruff School of Mechanical Engineering
Mar. 02, 2023




Ryan Lawler realized early on in her academic career that a scientist with a great idea can potentially change the world.
“But I didn’t realize the role that real estate can play in that,” said Lawler, general manager of BioSpark Labs – the collaborative, shared laboratory environment taking shape at Science Square at Georgia Tech.
Sitting adjacent to the Tech campus and formerly known as Technology Enterprise Park, Science Square is being reactivated and positioned as a life sciences research destination. The 18-acre site is abuzz with new construction, as an urban mixed-use development rises from the property.
Meanwhile, positioned literally on the ground floor of all this activity is BioSpark Labs, located in a former warehouse, fortuitously adjacent to the Global Center for Medical Innovation. It’s one of the newer best-kept secrets in the Georgia Tech research community.
BioSpark exists because the Georgia Tech Real Estate Office, led by Associate Vice President Tony Zivalich, recognized the need of this kind of lab space. Zivalich and his team have overseen the ideation, design, and funding of the facility, partnering with Georgia Advanced Technology Ventures, as well as the Wallace H. Coulter Department of Biomedical Engineering at Georgia Tech and Emory University, and the core facilities of the Petit Institute for Bioengineering and Bioscience.
“We are in the middle of a growing life sciences ecosystem, part of a larger vision in biotech research,” said Lawler, who was hired on to manage the space, bringing to the job a wealth of experience as a former research scientist and lab manager with a background in molecular and synthetic biology.
Researchers’ Advocate
BioSpark was designed to be a launch pad for high-potential entrepreneurs. It provides a fully equipped and professionally operated wet lab, in addition to a clean room, meeting and office space, to its current roster of clients, five life sciences and biotech startup, a number certain to increase – because BioSpark is undergoing a dramatic expansion that will include 11 more labs (shared and private space), an autoclave room, equipment and storage rooms.
“We want to provide the necessary services and support that an early-stage company needs to begin lab operations on day one,” said Lawler, who has put together a facility with $1.7 million in lab equipment. “I understand our clients’ perspective, I understand researchers and their experiments, and their needs, because I have first-hand proficiency in that world. So, I can advocate on their behalf.”
CO2 incubators, a spectrophotometer, a biosafety cabinet, a fume hood, a -80° freezer, an inverted microscope, and the autoclave are among the wide range of apparatus. Plus, a virtual treasure trove of equipment is available to BioSpark clients off-site through the Core Facilities of the Petit Institute for Bioengineering and Bioscience on the Georgia Tech campus.
“One of the unique things about us is, we’re agnostic,” Lawler said. “That is, our startups can come from anywhere. We have companies that have grown out of labs at Georgia State, Alabama State, Emory, and Georgia Tech. And we have interest from entrepreneurs from San Diego, who are considering relocating people from mature biotech markets to our space.”
Ground Floor Companies
Marvin Whiteley wants to help humans win the war against bacteria, and he has a plan, something he’s been cooking up for about 10 years, which has now manifested in his start-up company, SynthBiome, one of the five startups based at BioSpark Labs.
“We can discover a lot of antibiotics in the lab but translating them into the clinic has been a major challenge – antibiotic resistance is the main reason,” said Whiteley, professor in the School of Biological Sciences at Georgia Tech. “Something might work in a test tube easily enough and it might work in a mouse. But the thing is, bacteria know that mice are different - and and so bacteria act differently in mice than in humans.”
SynthBiome was built to help accelerate drug discovery. With that goal in mind, Whiteley and has team set out to develop a better, more effective preclinical model. “We basically learned to let the bacteria tell us what it’s like to be in a human,” Whiteley said. “So, we created a human environment in a test tube.”
Whiteley has said a desire to help people is foundational to his research. He wants to change how successful therapies are made. The same can be said for Dr. Pooja Tiwari, who launched her company, Arnav Biotech, to develop mRNA-based therapeutics and vaccines. Arnav Biotech also serves as a contract researcher and manufacturer, helping other researchers and companies interested in exploring mRNA in their work.
“There are only a handful of people who have deep knowledge of working in mRNA research, and this limits the access to it” said Tiwari, a former postdoctoral researcher at Georgia Tech and Emory. “We’d like to democratize access to mRNA-based therapeutics and vaccines by developing accessible and cost-effective mRNA therapeutics for global needs”.
Arnav – which has RNA right there in the name – in Sanskrit means ‘ocean.’ An ocean has no discernible borders, and Tiwari is working to build a biotech company that eliminates borders in equitable access to mRNA-based therapeutics and vaccines.
With this mission in mind, Arnav is developing mRNA-based, broad-spectrum antivirals as well as vaccines against pandemic potential viruses before the next pandemic hits. Arnav has recently entered in a collaboration with Sartorius BIA Separations, a company based on Slovenia, to advance their mRNA pipeline. While building its own mRNA therapeutics pipeline, Arnav is also helping other scientists explore mRNA as an alternative therapeutic and vaccine platform through its contract services.
“I think of the vaccine scientist who makes his medicine using proteins, but would like to explore the mRNA option,” Tiwari posits. “Maybe he doesn’t want to make the full jump into it. That’s where we come in, helping to drive interest in this field and help that scientist compare his traditional vaccines to see what mRNA vaccines looks like.”
She has all the equipment and instruments that she needs at BioSpark Labs and was one of the first start-ups to put down roots there. So far, it’s been the perfect partnership, Tiwari said, adding, “It kind of feels like BioSpark and Arnav are growing up together.”
News Contact
Writer: Jerry Grillo
Jan. 03, 2023

Though it is a cornerstone of virtually every process that occurs in living organisms, the proper folding and transport of biological proteins is a notoriously difficult and time-consuming process to experimentally study.
In a new paper published in eLife, researchers in the School of Biological Sciences and the School of Computer Science have shown that AF2Complex may be able to lend a hand.
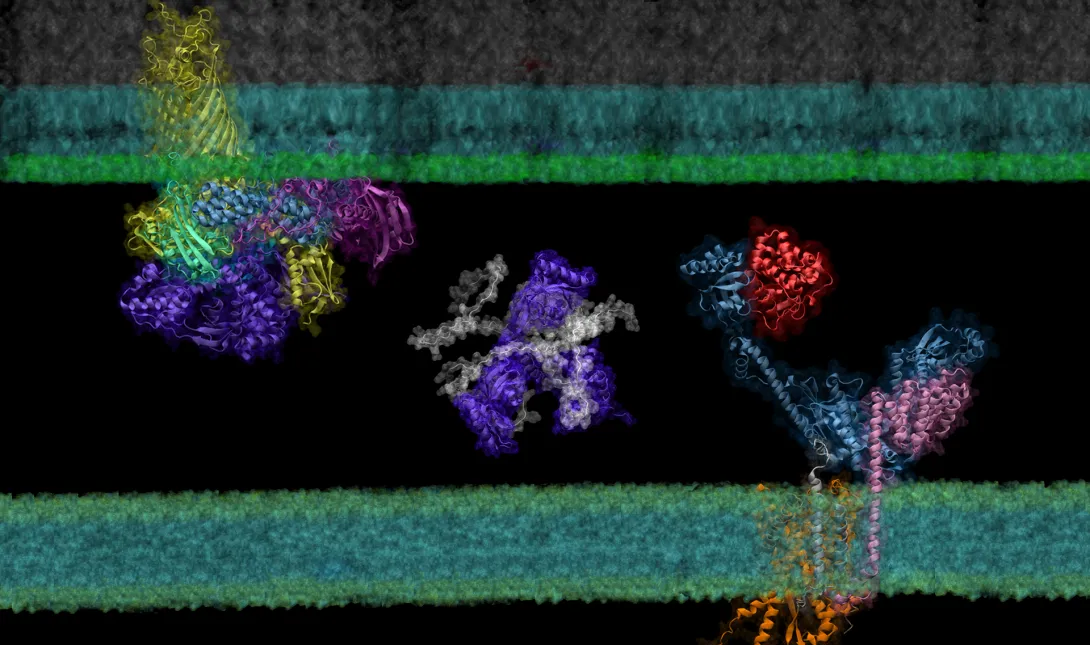
Building on the models of DeepMind’s AlphaFold 2, a machine learning tool able to predict the detailed three-dimensional structures of individual proteins, AF2Complex — short for AlphaFold 2 Complex — is a deep learning tool designed to predict the physical interactions of multiple proteins. With these predictions, AF2Complex is able to calculate which proteins are likely to interact with each other to form functional complexes in unprecedented detail.
“We essentially conduct computational experiments that try to figure out the atomic details of supercomplexes (large interacting groups of proteins) important to biological functions,” explained Jeffrey Skolnick, Regents’ Professor and Mary and Maisie Gibson Chair in the School of Biological Sciences, and one of the corresponding authors of the study. With AF2Complex, which was developed last year by the same research team, it’s “like using a computational microscope powered by deep learning and supercomputing.”
In their latest study, the researchers used this ‘computational microscope’ to examine a complicated protein synthesis and transport pathway, hoping to clarify how proteins in the pathway interact to ultimately transport a newly synthesized protein from the interior to the outer membrane of the bacteria — and identify players that experiments might have missed. Insights into this pathway may identify new targets for antibiotic and therapeutic design while providing a foundation for using AF2Complex to computationally expedite this type of biology research as a whole.
Computing complexes
Created by London-based artificial intelligence lab DeepMind, AlphaFold 2 is a deep learning tool able to generate accurate predictions about the three-dimensional structure of single proteins using just their building blocks, amino acids. Taking things a step further, AF2Complex uses these structures to predict the likelihood that proteins are able to interact to form a functional complex, what aspects of each structure are the likely interaction sites, and even what protein complexes are likely to pair up to create even larger functional groups called supercomplexes.
“The successful development of AF2Complex earlier this year makes us believe that this approach has tremendous potential in identifying and characterizing the set of protein-protein interactions important to life,” shared Mu Gao, a senior research scientist at Georgia Tech. “To further convince the broad molecular biology community, we [had to] demonstrate it with a more convincing, high impact application.”
The researchers chose to apply AF2Complex to a pathway in Escherichia coli (E. coli), a model organism in life sciences research commonly used for experimental DNA manipulation and protein production due to its relative simplicity and fast growth.
To demonstrate the tool’s power, the team examined the synthesis and transport of proteins that are essential for exchanging nutrients and responding to environmental stressors: outer membrane proteins, or OMPs for short. These proteins reside on the outermost membrane of gram-negative bacteria, a large family of bacteria characterized by the presence of inner and outer membranes, like E. coli. However, the proteins are created inside the cell and must be transported to their final destinations.
“After more than two decades of experimental studies, researchers have identified some of the protein complexes of key players, but certainly not all of them,” Gao explained. AF2Complex “could enable us to discover some novel and interesting features of the OMP biogenesis pathway that were missed in previous experimental studies.”
New insights
Using the Summit supercomputer at the Oak Ridge National Laboratory, the team, which included computer science undergraduate Davi Nakajima An, put AF2Complex to the test. They compared a few proteins known to be important in the synthesis and transport of OMPs to roughly 1,500 other proteins — all of the known proteins in E. coli’s cell envelope — to see which pairs the tool computed as most likely to interact, and which of those pairs were likely to form supercomplexes.
To determine if AF2Complex’s predictions were correct, the researchers compared the tool’s predictions to known experimental data. “Encouragingly,” said Skolnick, “among the top hits from computational screening, we found previously known interacting partners.” Even within those protein pairs known to interact, AF2Complex was able to highlight structural details of those interactions that explain data from previous experiments, lending additional confidence to the tool’s accuracy.
In addition to known interactions, AF2Complex predicted several unknown pairs. Digging further into these unexpected partners revealed details on what aspects of the pairs might interact to form larger groups of functional proteins, likely active configurations of complexes that have previously eluded experimentalists, and new potential mechanisms for how OMPs are synthesized and transported.
“Since the outer membrane pathway is both vital and unique to gram-negative bacteria, the key proteins involved in this pathway could be novel targets for new antibiotics,” said Skolnick. “As such, our work that provides molecular insights about these new drug targets might be valuable to new therapeutic design.”
Beyond this pathway, the researchers are hopeful that AF2Complex could mean big things for biology research.
“Unlike predicting structures of a single protein sequence, predicting the structural model of a supercomplex can be very complicated, especially when the components or stoichiometry of the complex is unknown,” Gao noted. “In this regard, AF2Complex could be a new computational tool for biologists to conduct trial experiments of different combinations of proteins,” potentially expediting and increasing the efficiency of this type of biology research as a whole.
AF2Complex is an open-source tool available to the public and can be downloaded here.
This work was supported in part by the DOE Office of Science, Office of Biological and Environmental Research (DOE DE-SC0021303) and the Division of General Medical Sciences of the National Institute Health (NIH R35GM118039). DOI: https://doi.org/10.7554
News Contact
Writer: Audra Davidson
Communications Officer
College of Sciences at Georgia Tech
Editor: Jess Hunt-Ralston
Director of Communications
College of Sciences at Georgia Tech
Dec. 03, 2021

With holiday shopping deadlines looming, consumers cannot escape the impact of the global microelectronic chip shortage. From daily news reports about manufacturers unable to complete orders due to the lack of chips, to “out of stock” messages across websites on popular electronics items, one of the impacts of COVID was to lay bare the massive importance of the microelectronic chip in daily modern life, and how a single-location centered manufacturing nexus can upend the consumer market on a massive scale. The combination of these real-world impacts on supply chains, as well as the need to localize semiconductor and chip manufacturing gave Congress the impetus to pass the “Creating Helpful Incentives to Produce Semiconductors for America Act (CHIPS)”. CHIPS seeks to increase investments and incentives to support U.S. semiconductor manufacturing, research and development, and supply chain security.
The Georgia Institute of Technology was the first university to offer a comprehensive curriculum on microelectronics and microsystems design and packaging and, currently, numerous faculty at Georgia Tech are widely known for their work in semiconductor and microelectronics technologies. In December of 2021 Georgia Tech researchers will again showcase how their pushes the boundaries of microelectronics technologies at the IEEE International Electron Devices Meeting (IEDM).
The School of Electrical and Computer Engineering research teams of Assistant Professor Asif Khan, partnering with Dan Fielder Professor Muhannad Bakir, and Associate Professor Shimeng Yu, partnering with Professor Sung-Kyu Lim and Assistant Professor Shaolan Li, have dominated the 2021 IEDM presentation line-up with a total of 8 accepted papers. With topics ranging from ferroelectric materials for memory, new advances in ALD process, and in-memory computing and 3D reconfigurable architectures, the research presented by these teams is at the cutting-edge of advancing computing power and consumer electronics. In addition to the research presentations, Electrical and Computing Engineering Faculty & Director of the 3D Systems Packaging Research Center at GT will be presenting a short course session on devoted to “Heterogenous Integration Using Chiplets & Advanced Packaging”
Noting the timely nature of these research advancements, Arijit Raychowdhory; Professor and Steve W. Chaddick School Chair in Electrical and Computer Engineering noted, “IEDM is a premier conference in the area of semiconductor devices. Such a strong performance by GT ECE exemplifies the strength of our program, the ingenuity of our students and the innovation driven by our world-class faculty. Sincere congratulations to Professors Khan, Yu Bakir, Lim and Li for their pioneering research in semiconductor logic and memory technologies, that are critical for our nation and our industries.”
Asif Khan is an assistant professor in the School of Electrical and Computer Engineering at the Georgia Tech. He received his Ph.D. in electrical engineering and computer sciences from the University of California, Berkeley in 2015. His work led to the first experimental proof-of-concept demonstration of the negative capacitance effect in ferroelectric oxides. His group at Georgia Tech conceptualizes and fabricates electronic devices that leverage interesting physics and novel phenomena in emerging materials (such as ferroelectrics, antiferroelectrics and strongly correlated systems) to overcome the “fundamental” limits in computation and to address the most pressing challenges in electronics and the semiconductor industry.
Shimeng Yu is currently an associate professor in the School of Electrical and Computer Engineering at the Georgia Tech. He received the B.S. degree in microelectronics from Peking University in 2009, and the M.S. degree and Ph.D. degree in electrical engineering from Stanford University in 2011 and 2013, respectively. From 2013 to 2018, he was an assistant professor at Arizona State University. Prof. Yu’s research interests are the semiconductor devices and integrated circuits for energy-efficient computing systems. His research expertise is on the emerging non-volatile memories for applications such as deep learning accelerator, in-memory computing, 3D integration, and hardware security.
Muhannad S. Bakir is the Dan Fielder Professor in the School of Electrical and Computer Engineering at Georgia Tech. Dr. Bakir and his research group have received more than thirty paper and presentation awards including six from the IEEE Electronic Components and Technology Conference (ECTC), four from the IEEE International Interconnect Technology Conference (IITC), one from the IEEE Custom Integrated Circuits Conference (CICC), and two from the IEEE Transactions on Components Packaging and Manufacturing Technology (TCPMT). Muhannad S. Bakir received the B.E.E. degree from Auburn University, Auburn, AL, in 1999 and the M.S. and Ph.D. degrees in electrical and computer engineering from the Georgia Tech in 2000 and 2003, respectively. His research interests include, heterogeneous microsystem design and integration, including 2.5D and 3D ICs and packaging, electrical and photonic interconnects, and embedded cooling technologies.
Sung Kyu Lim received B.S. (1994), M.S. (1997), and Ph.D. (2000) degrees all from the Computer Science Department at UCLA. During 2000-2001, he was a post-doctoral scholar at UCLA, and a senior engineer at Aplus Design Technologies, Inc. Lim joined the School of Electrical and Computer Engineering at Georgia Institute of Technology an assistant professor. He is currently the director of the GTCAD (Georgia Tech Computer Aided Design) Laboratory and focuses on VLSI and 3D circuit architecture and packaging.
Shaolan Li received his B.Eng. degree with highest honor from the Hong Kong University of Science and Technology (HKUST) in 2012, and his Ph.D. from UT Austin in 2018, all in electrical engineering. Prior joining Georgia Tech as an assistant professor in 2019, he was a post-doctoral fellow in the Department of Electrical and Computer Engineering at UT Austin from 2018-2019. He also held intern positions in Broadcom Ltd. in Sunnyvale, California, and NXP in Tempe, Arizona during 2013-2014. His research interests are broadly in analog, mixed-signal, and RF integrated circuits. His expertise is in high-performance data converters, ultra-low-power low-cost sensor interface, and novel analog mixed-signal architectures for design automation.
The IEEE International Electron Devices Meeting (IEDM) is the world’s preeminent forum for reporting technological breakthroughs in the areas of semiconductor and electronic device technology, design, manufacturing, physics, and modeling. IEDM is the flagship conference for nanometer-scale CMOS transistor technology, advanced memory, displays, sensors, MEMS devices, novel quantum and nano-scale devices and phenomenology, optoelectronics, devices for power and energy harvesting, high-speed devices, as well as process technology and device modeling and simulation. Georgia Tech research teams have a strong track of record in IEDM publications in the recent years, including 8, 4, 9 and 7 papers presented in IEDM 2018, 2019, 2020 and 2021, respectively.
- Christa M. Ernst
News Contact
Christa M. Ernst - Interdisciplinary Research Communications Program Manager
Topics: Materials | Nanotechnology | Robotics
Georgia Institute of Technology| christa.ernst@research.gatech.edu