





Apr. 13, 2020

Georgia Tech Arts is still seeking projects for the 2021 ACCelerate: ACC Smithsonian
Creativity and Innovation Festival in Washington, DC. All Georgia Tech students, faculty, and staff are invited to apply by May 1, 2020.
Even if you do not have a finished project exploring the intersection of science,
engineering, art, design, and technology, we encourage you to speak with Es
Famojure at esther.famojure@arts.gatech.edu about your concepts.
Learn about Georgia Tech's 2019 participants for some inspiration.
The festival brings together all institutions included in the Atlantic Coast Conference to
celebrate creativity and innovation with a specific focus on science, engineering, arts, and
design. It will be held April 9 -11, 2021 at the Smithsonian National Museum of American
History.
Submit your project for consideration by May 1, 2020 to be considered.
News Contact
Es Famojure
esther.famojure@arts.gatech.edu
May. 06, 2012
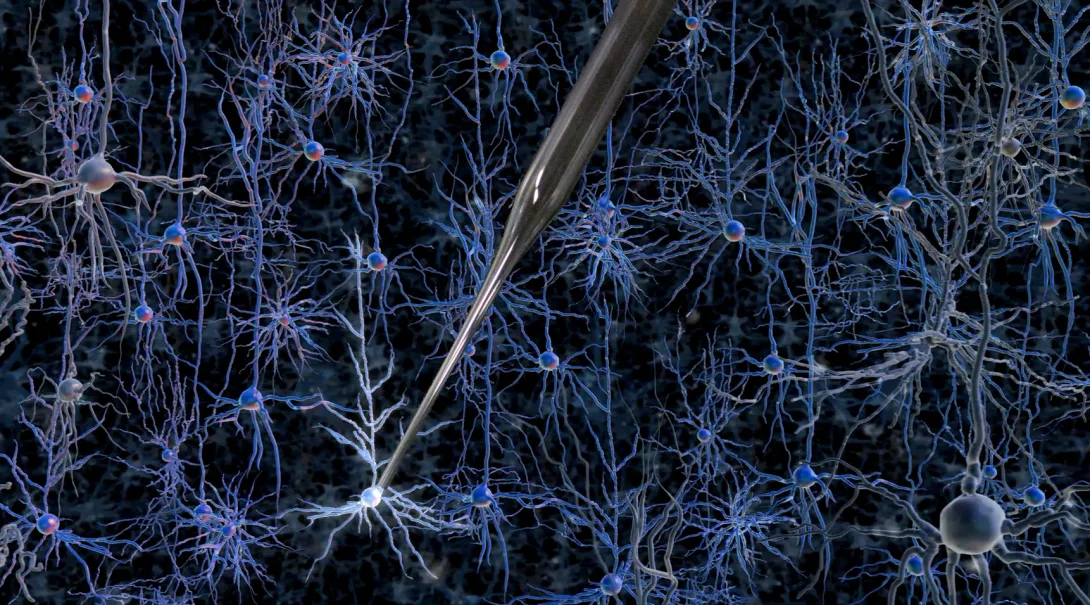
Gaining access to the inner workings of a neuron in the living brain offers a wealth of useful information: its patterns of electrical activity, its shape, even a profile of which genes are turned on at a given moment. However, achieving this entry is such a painstaking task that it is considered an art form; it is so difficult to learn that only a small number of labs in the world practice it.
But that could soon change: Researchers at MIT and the Georgia Institute of Technology have developed a way to automate the process of finding and recording information from neurons in the living brain. The researchers have shown that a robotic arm guided by a cell-detecting computer algorithm can identify and record from neurons in the living mouse brain with better accuracy and speed than a human experimenter.
The new automated process eliminates the need for months of training and provides long-sought information about living cells’ activities. Using this technique, scientists could classify the thousands of different types of cells in the brain, map how they connect to each other, and figure out how diseased cells differ from normal cells.
The project is a collaboration between the labs of Ed Boyden, associate professor of biological engineering and brain and cognitive sciences at MIT, and Craig Forest, an assistant professor in the George W. Woodruff School of Mechanical Engineering at Georgia Tech.
“Our team has been interdisciplinary from the beginning, and this has enabled us to bring the principles of precision machine design to bear upon the study of the living brain,” Forest says. His graduate student, Suhasa Kodandaramaiah, spent the past two years as a visiting student at MIT, and is the lead author of the study, which appears in the May 6 issue of Nature Methods.
The method could be particularly useful in studying brain disorders such as schizophrenia, Parkinson’s disease, autism and epilepsy, Boyden says. “In all these cases, a molecular description of a cell that is integrated with [its] electrical and circuit properties … has remained elusive,” says Boyden, who is a member of MIT’s Media Lab and McGovern Institute for Brain Research. “If we could really describe how diseases change molecules in specific cells within the living brain, it might enable better drug targets to be found.”
Automation
Kodandaramaiah, Boyden and Forest set out to automate a 30-year-old technique known as whole-cell patch clamping, which involves bringing a tiny hollow glass pipette in contact with the cell membrane of a neuron, then opening up a small pore in the membrane to record the electrical activity within the cell. This skill usually takes a graduate student or postdoc several months to learn.
Kodandaramaiah spent about four months learning the manual patch-clamp technique, giving him an appreciation for its difficulty. “When I got reasonably good at it, I could sense that even though it is an art form, it can be reduced to a set of stereotyped tasks and decisions that could be executed by a robot,” he says.
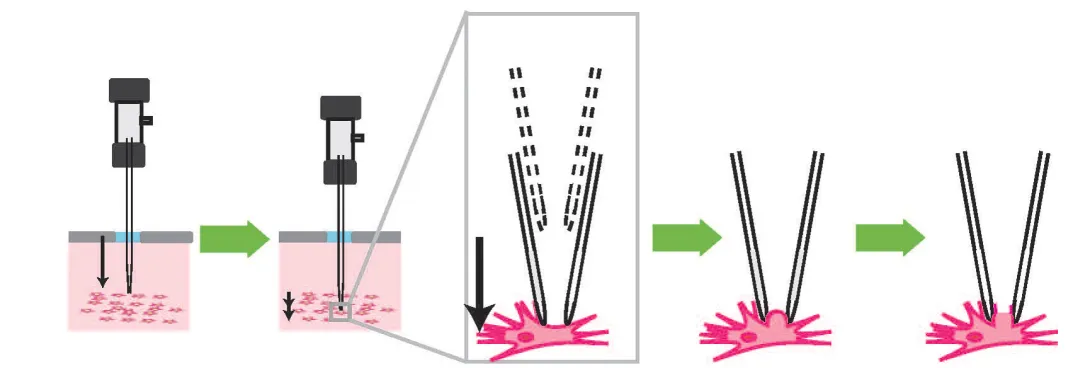
To that end, Kodandaramaiah and his colleagues built a robotic arm that lowers a glass pipette into the brain of an anesthetized mouse with micrometer accuracy. As it moves, the pipette monitors a property called electrical impedance — a measure of how difficult it is for electricity to flow out of the pipette. If there are no cells around, electricity flows and impedance is low. When the tip hits a cell, electricity can’t flow as well and impedance goes up.
The pipette takes two-micrometer steps, measuring impedance 10 times per second. Once it detects a cell, it can stop instantly, preventing it from poking through the membrane. “This is something a robot can do that a human can’t,” Boyden says.
Once the pipette finds a cell, it applies suction to form a seal with the cell’s membrane. Then, the electrode can break through the membrane to record the cell’s internal electrical activity. The robotic system can detect cells with 90 percent accuracy, and establish a connection with the detected cells about 40 percent of the time.
The researchers also showed that their method can be used to determine the shape of the cell by injecting a dye; they are now working on extracting a cell’s contents to read its genetic profile.
Development of the new technology was funded primarily by the National Institutes of Health, the National Science Foundation and the MIT Media Lab.
New era for robotics
The researchers recently created a startup company, Neuromatic Devices, to commercialize the device.
The researchers are now working on scaling up the number of electrodes so they can record from multiple neurons at a time, potentially allowing them to determine how different parts of the brain are connected.
They are also working with collaborators to start classifying the thousands of types of neurons found in the brain. This “parts list” for the brain would identify neurons not only by their shape — which is the most common means of classification — but also by their electrical activity and genetic profile.
“If you really want to know what a neuron is, you can look at the shape, and you can look at how it fires. Then, if you pull out the genetic information, you can really know what’s going on,” Forest says. “Now you know everything. That’s the whole picture.”
Boyden says he believes this is just the beginning of using robotics in neuroscience to study living animals. A robot like this could potentially be used to infuse drugs at targeted points in the brain, or to deliver gene therapy vectors. He hopes it will also inspire neuroscientists to pursue other kinds of robotic automation — such as in optogenetics, the use of light to perturb targeted neural circuits and determine the causal role that neurons play in brain functions.
Neuroscience is one of the few areas of biology in which robots have yet to make a big impact, Boyden says. “The genome project was done by humans and a giant set of robots that would do all the genome sequencing. In directed evolution or in synthetic biology, robots do a lot of the molecular biology,” he says. “In other parts of biology, robots are essential.”
Other co-authors include MIT grad student Giovanni Talei Franzesi and MIT postdoc Brian Y. Chow.
Research News & Publications Office
Georgia Institute of Technology
75 Fifth Street, N.W., Suite 314
Atlanta, Georgia 30308 USA
Media Relations Contacts: Abby Robinson (abby@innovate.gatech.edu; 404-385-3364) or Caroline McCall (cmccall5@mit.edu; 617-253-1682)
Writer: Anne Trafton, MIT News
News Contact
Abby Robinson
Research News and Publications
abby@innovate.gatech.edu
404-385-3364
Jan. 19, 2012
Designing an all-terrain robot for search-and-rescuemissions is an arduous task for scientists. The machine must be flexible enoughto move over uneven surfaces, yet not so big that it’s restricted from tightspaces. It might also be required to climb slopes of varying inclines. Existingrobots can do many of these things, but the majority require large amounts of energyand are prone to overheating. Georgia Tech researchers have designed a new machineby studying the locomotion of a certain type of flexible, efficient animal.
“By using their scales to control frictional properties,snakes are able to move large distances while exerting very little energy,”said Hamid Marvi, a Mechanical Engineering Ph.D. candidate at Georgia Tech.
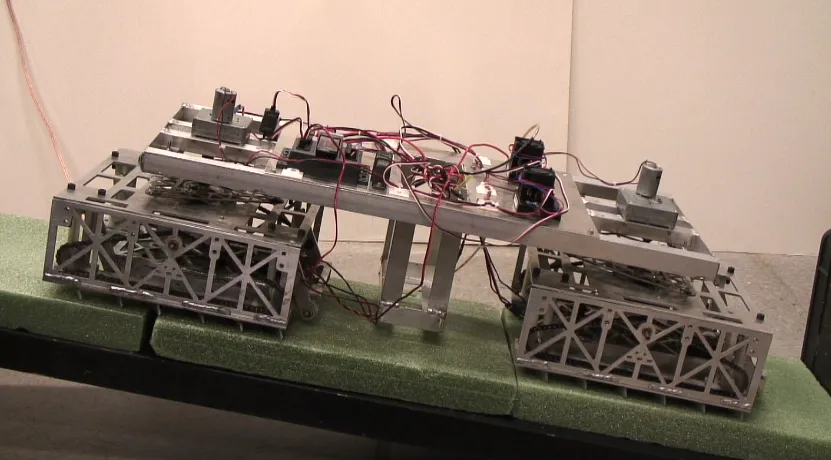
While studying and videotaping the movements of 20 differentspecies at Zoo Atlanta, Marvi developed Scalybot 2, a robot that replicatesrectilinear locomotion of snakes. He unveiled the robot this month at theSociety for Integrative & Comparative Biology (SICB) annual meeting inCharleston, S.C.
“During rectilinearlocomotion, a snake doesn’t have to bend its body laterally to move,”explained Marvi. “Snakes lift their ventral scales and pull themselves forwardby sending a muscular traveling wave from head to tail. Rectilinear locomotion isvery efficient and is especially useful for crawling within crevices, aninvaluable benefit for search-and-rescue robots.”
Scalybot 2 can automatically change the angle of its scales whenit encounters different terrains and slopes. This adjustment allows the robotto either fight or generate friction. The two-link robot is controlled by aremote-controlled joystick and can move forward and backward using four motors.
“Snakes are highly maligned creatures,” said Joe Mendelson, curatorof herpetology at Zoo Atlanta. “I really like that Hamid’s research is showingthe public that snakes can help people.”
Marvi’s advisor is David Hu, an assistant professor in theSchools of Mechanical Engineering and Biology. Hu and his research team areprimarily focused on animal locomotion. They’ve studied how dogs and otheranimals shake water off their bodies and how mosquitos fly through rainstorms.
This isn’t the first time Hu’s lab has looked at snake locomotion.Last summer the team developed Scalybot 1, a two-link climbing robot that replicatesconcertina locomotion. The push-and-pull, accordion-style movement featuresalternating scale activity.
This project is supported by the National Science Foundation (NSF)(Award No. PHY-0848894). The content is solely the responsibility of the principalinvestigators and does not necessarily represent the official views of the NSF.
News Contact
Jason Maderer
Georgia Tech Media Relations
404-385-2966
maderer@gatech.edu
May. 09, 2011

Search and rescue missions have followed each of the devastating earthquakes that hit Haiti, New Zealand and Japan during the past 18 months. Machines able to navigate through complex dirt and rubble environments could have helped rescuers after these natural disasters, but building such machines is challenging.
Researchers at the Georgia Institute of Technology recently built a robot that can penetrate and "swim" through granular material. In a new study, they show that varying the shape or adjusting the inclination of the robot's head affects the robot's movement in complex environments.
"We discovered that by changing the shape of the sand-swimming robot's head or by tilting its head up and down slightly, we could control the robot's vertical motion as it swam forward within a granular medium,” said Daniel Goldman, an assistant professor in the Georgia Tech School of Physics.
Results of the study will be presented on May 10 at the 2011 IEEE International Conference on Robotics and Automation in Shanghai. Funding for this research was provided by the Burroughs Wellcome Fund, National Science Foundation and Army Research Laboratory.
The study was conducted by Goldman, bioengineering doctoral graduate Ryan Maladen, physics graduate student Yang Ding and physics undergraduate student Andrew Masse, all from Georgia Tech, and Northwestern University mechanical engineering adjunct professor Paul Umbanhowar.
"The biological inspiration for our sand-swimming robot is the sandfish lizard, which inhabits the Sahara desert in Africa and rapidly buries into and swims within sand," explained Goldman. "We were intrigued by the sandfish lizard's wedge-shaped head that forms an angle of 140 degrees with the horizontal plane, and we thought its head might be responsible for or be contributing to the animal's ability to maneuver in complex environments."
For their experiments, the researchers attached a wedge-shaped block of wood to the head of their robot, which was built with seven connected segments, powered by servo motors, packed in a latex sock and wrapped in a spandex swimsuit. The doorstop-shaped head -- which resembled the sandfish's head -- had a fixed lower length of approximately 4 inches, height of 2 inches and a tapered snout. The researchers examined whether the robot's vertical motion could be controlled simply by varying the inclination of the robot's head.
Before each experimental run in a test chamber filled with quarter-inch-diameter plastic spheres, the researchers submerged the robot a couple inches into the granular medium and leveled the surface. Then they tracked the robot's position until it reached the end of the container or swam to the surface.
The researchers investigated the vertical movement of the robot when its head was placed at five different degrees of inclination. They found that when the sandfish-inspired head with a leading edge that formed an angle of 155 degrees with the horizontal plane was set flat, negative lift force was generated and the robot moved downward into the media. As the tip of the head was raised from zero to 7 degrees relative to the horizontal, the lift force increased until it became zero. At inclines above 7 degrees, the robot rose out of the medium.
"The ability to control the vertical position of the robot by modulating its head inclination opens up avenues for further research into developing robots more capable of maneuvering in complex environments, like debris-filled areas produced by an earthquake or landslide," noted Goldman.
The robotics results matched the research team's findings from physics experiments and computational models designed to explore how head shape affects lift in granular media.
"While the lift forces of objects in air, such as airplanes, are well understood, our investigations into the lift forces of objects in granular media are some of the first ever," added Goldman.
For the physics experiments, the researchers dragged wedge-shaped blocks through a granular medium. Blocks with leading edges that formed angles with the horizontal plane of less than 90 degrees resembled upside-down doorstops, the block with a leading edge equal to 90 degrees was a square, and blocks with leading edges greater than 90 degrees resembled regular doorstops.
They found that blocks with leading edges that formed angles with the horizontal plane less than 80 degrees generated positive lift forces and wedges with leading edges greater than 120 degrees created negative lift. With leading edges between 80 and 120 degrees, the wedges did not generate vertical forces in the positive or negative direction.
Using a numerical simulation of object drag and building on the group’s previous studies of lift and drag on flat plates in granular media, the researchers were able to describe the mechanism of force generation in detail.
"When the leading edge of the robot head was less than 90 degrees, the robot's head experienced a lift force as it moved forward, which resulted in a torque imbalance that caused the robot to pitch and rise to the surface," explained Goldman.
Since this study, the researchers have attached a wedge-shaped head on the robot that can be dynamically modulated to specific angles. With this improvement, the researchers found that the direction of movement of the robot is sensitive to slight changes in orientation of the head, further validating the results from their physics experiments and computational models.
Being able to precisely control the tilt of the head will allow the researchers to implement different strategies of head movement during burial and determine the best way to wiggle deep into sand. The researchers also plan to test the robot's ability to maneuver through material similar to the debris found after natural disasters and plan to examine whether the sandfish lizard adjusts its head inclination to ensure a straight motion as it dives into the sand.
This material is based on research sponsored by the Burroughs Wellcome Fund, the National Science Foundation (NSF) under Award Number PHY-0749991, and the Army Research Laboratory (ARL) under Cooperative Agreement Number W911NF-08-2-0004. The views and conclusions contained in this document are those of the authors and should not be interpreted as representing the official policies, either expressed or implied, of NSF, ARL or the U.S. government.
Research News & Publications Office
Georgia Institute of Technology
75 Fifth Street, N.W., Suite 314
Atlanta, Georgia 30308 USA
Media Relations Contacts: Abby Robinson (abby@innovate.gatech.edu; 404-385-3364) or John Toon (jtoon@gatech.edu; 404-894-6986)
Writer: Abby Robinson
News Contact
Abby Robinson
Research News and Publications
Contact Abby Robinson
404-385-3364