Jan. 19, 2012
Designing an all-terrain robot for search-and-rescuemissions is an arduous task for scientists. The machine must be flexible enoughto move over uneven surfaces, yet not so big that it’s restricted from tightspaces. It might also be required to climb slopes of varying inclines. Existingrobots can do many of these things, but the majority require large amounts of energyand are prone to overheating. Georgia Tech researchers have designed a new machineby studying the locomotion of a certain type of flexible, efficient animal.
“By using their scales to control frictional properties,snakes are able to move large distances while exerting very little energy,”said Hamid Marvi, a Mechanical Engineering Ph.D. candidate at Georgia Tech.
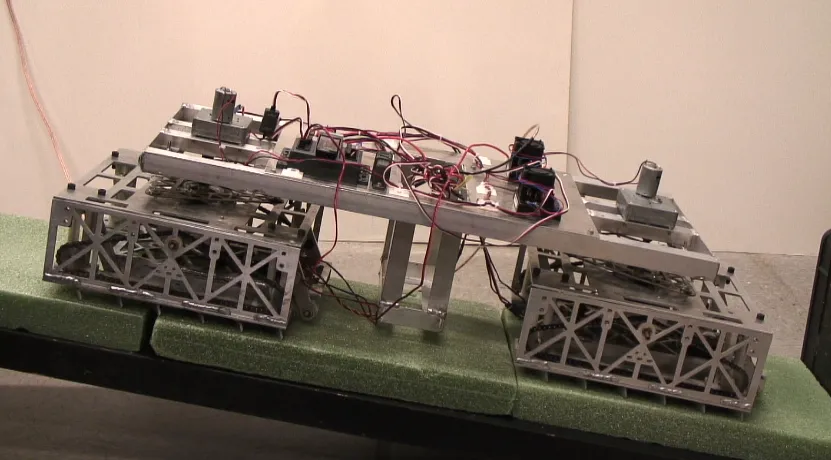
While studying and videotaping the movements of 20 differentspecies at Zoo Atlanta, Marvi developed Scalybot 2, a robot that replicatesrectilinear locomotion of snakes. He unveiled the robot this month at theSociety for Integrative & Comparative Biology (SICB) annual meeting inCharleston, S.C.
“During rectilinearlocomotion, a snake doesn’t have to bend its body laterally to move,”explained Marvi. “Snakes lift their ventral scales and pull themselves forwardby sending a muscular traveling wave from head to tail. Rectilinear locomotion isvery efficient and is especially useful for crawling within crevices, aninvaluable benefit for search-and-rescue robots.”
Scalybot 2 can automatically change the angle of its scales whenit encounters different terrains and slopes. This adjustment allows the robotto either fight or generate friction. The two-link robot is controlled by aremote-controlled joystick and can move forward and backward using four motors.
“Snakes are highly maligned creatures,” said Joe Mendelson, curatorof herpetology at Zoo Atlanta. “I really like that Hamid’s research is showingthe public that snakes can help people.”
Marvi’s advisor is David Hu, an assistant professor in theSchools of Mechanical Engineering and Biology. Hu and his research team areprimarily focused on animal locomotion. They’ve studied how dogs and otheranimals shake water off their bodies and how mosquitos fly through rainstorms.
This isn’t the first time Hu’s lab has looked at snake locomotion.Last summer the team developed Scalybot 1, a two-link climbing robot that replicatesconcertina locomotion. The push-and-pull, accordion-style movement featuresalternating scale activity.
This project is supported by the National Science Foundation (NSF)(Award No. PHY-0848894). The content is solely the responsibility of the principalinvestigators and does not necessarily represent the official views of the NSF.
News Contact
Jason Maderer
Georgia Tech Media Relations
404-385-2966
maderer@gatech.edu